Welcome to the blog of Dr. Ken Tindell, CTO of Canis Automotive Labs. This blog is focused on the work Canis is doing on CAN bus and CAN security, but also covers the design of embedded software and hardware for automotive systems and the Yes We Can project at Canis that develops hardware, software and tools for CAN bus: the CANHack toolkit for injecting faults into the CAN protocol, CANPico and CANHack hardware boards for the Raspberry Pi Pico, and the can2 logic analyzer CAN protocol decoder.
Canis Labs has developed an open source logic analyzer decoder for CAN called can2. It has special features to warn about unusual events that could indicate a CAN protocol attack, works with low-cost hardware (less than $10!), runs on Linux, Windows and macOS and can also export decoded frames to a pcapng packet capture file for display in Wireshark.
PulseView shows as much detail as fits into an item for a given time scale, but a tooltip appears with the full data if the mouse pointer hovers over an item. For example, here the value of the 4-bit DLC field is shown with a tooltip:
The decoder also checks the frame for valid fields and marks when an error is detected. For example, it will show in the warning line when the received CRC does not match the calculated CRC, when the ACK field is not 0, when a stuff error has been detected, and so on. It also shows an active error frame (the superposition, the error delimiter, and the IFS field following an error frame).
The warning here is a Stuff error – the result of an error being signalled by another CAN controller. The decoder shows the Error Flag (which includes the superposition of dominant bits from many controllers) and the Error Delimiter. The trace also shows the frame being re-transmitted successfully.
The Double Receive event is a particularly interesting property of CAN: because a frame is received one bit time before it is transmitted, it is possible that an error in the last bit of the EOF causes the transmitter to detect an error and retransmit the frame, leading to it being received twice. This is not a bug in the CAN protocol: it is an inevitable consequence of implementing an atomic broadcast protocol (something that most other communication protocols do not even attempt to provide, which is one reason why CAN is such a superbly reliable fieldbus protocol). The decoder warns of this specific event:
This event should happen rarely (a bit error must occur exactly at the last bit of EOF). But it can be engineered to occur by an attack on the bus: by deliberately injecting a dominant bit at the last bit of EOF an attacker can force the frame to be retransmitted and received twice. If the frame being targeted contains event data then that event will be acted upon twice by receivers, which could cause all kinds of things to go wrong – the very purpose of a malicious attack.
The decoder also shows when there is an overload frame – something that should never be seen since modern CAN controllers never generate these frames. The screenshot below shows a frame that is sent but then a sequence of overload frames is injected to hold all the CAN controllers in an overload loop. This is a clear indication of a type of denial-of-service attack on the CAN bus (in this case it was carried out by the CANHack toolkit on the Raspberry Pi Pico).
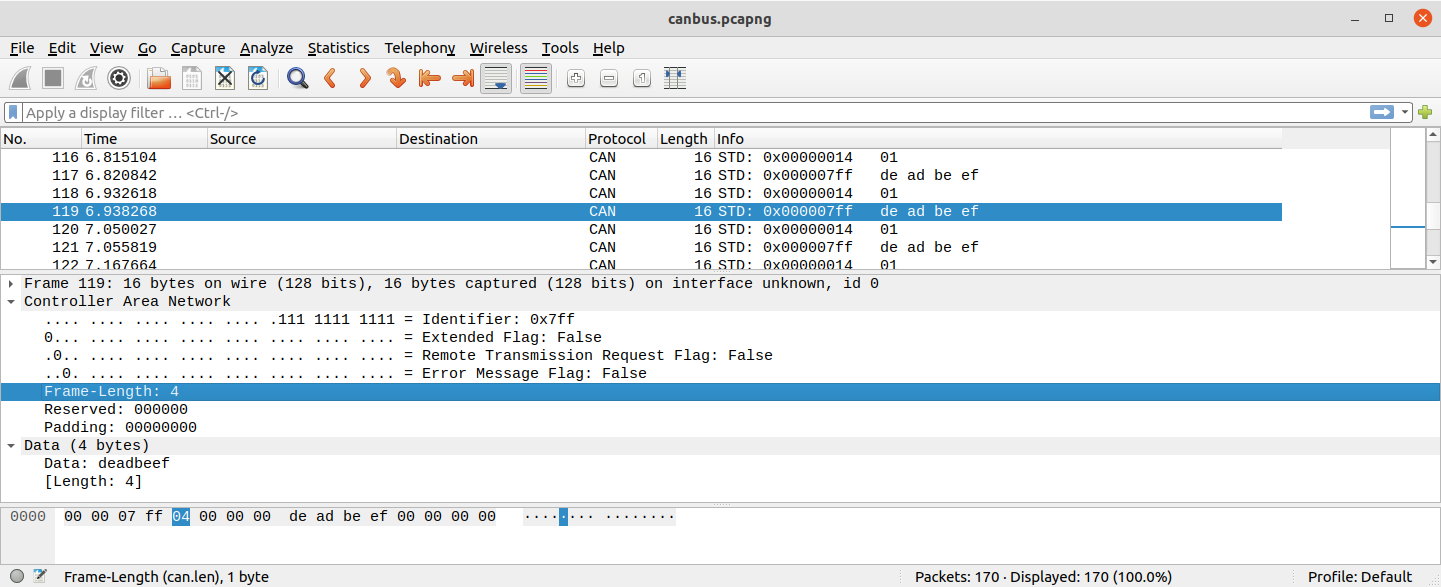
The protocol decoder is designed to help spot these events from a logic analyzer trace – it can see things that a simple list of received CAN frames would not show. But it also can interface to CAN frame logging tools: the decoder has an option to export CAN frames in a packet capture format (called ‘pcapng’) that tools such as Wireshark can process. A trace of many frames can be shown in Wireshark as a conventional list of frames. For example, the screenshot below shows trace of a pair of CAN frames sent roughly every 100ms.
When the exported packet capture file is read in to Wireshark it shows as a simple list of frames:
The timestamps attached to CAN frames in the packet stream are very accurate and these are useful when hunting for a particular incident in the frame view of Wireshark (or other tools) to navigate within PulseView to find details of what was happening on the wire around an incident.
The source code to the CAN protocol decoder is available in the Yes We CAN repository on GitHub (the decoder is in the folder src/can2 ). The best way to install the Sigrok tools (PulseView and sigrok-cli) is to download them directly from Sigrok More details on setting up the decoder can be found in a blog post.